基于强化学习的特征工程算法研究[其他][其他]
發(fā)表于:2021/7/5 下午4:12:00
2.3~2.7 GHz双模式低噪声射频接收前端全集成芯片的设计[微波|射频][其他]
發(fā)表于:2021/7/5 下午4:07:00
基于场路耦合的反激变换器板级辐射研究[电源技术][其他]
發(fā)表于:2021/7/5 下午4:02:00
采用平面分栅结构的高增益宽带射频VDMOS研制[微波|射频][其他]
發(fā)表于:2021/7/5 下午3:57:00
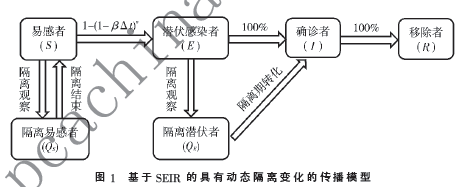
基于SEIR模型的复杂网络上的动态隔离措施研究[其他][其他]
發(fā)表于:2021/6/10 下午4:00:02
一种20 MS/s基于VCO比较器的二阶噪声整形SAR ADC设计[其他][其他]
發(fā)表于:2021/6/10 下午3:43:42

一种基于实例分割和点云配准的六维位姿估计方法[其他][其他]
發(fā)表于:2021/6/10 下午3:33:45