
GJB289A總線應(yīng)用層協(xié)議分析及研究[嵌入式技術(shù)][航空航天]
發(fā)表于:11/3/2016 2:08:00 PM
高速GJB289A總線技術(shù)綜述[嵌入式技術(shù)][航空航天]
發(fā)表于:11/1/2016 4:25:00 PM
基于補(bǔ)償靈敏度PID方法的負(fù)荷頻率控制[電源技術(shù)][智能電網(wǎng)]
發(fā)表于:11/1/2016 4:09:00 PM
多時(shí)鐘域并行測(cè)試控制器的設(shè)計(jì)[測(cè)試測(cè)量][工業(yè)自動(dòng)化]
發(fā)表于:10/31/2016 8:20:00 PM
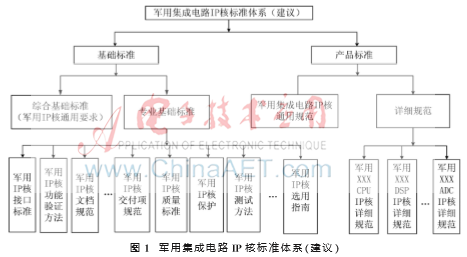
軍用IP核標(biāo)準(zhǔn)體系關(guān)鍵共性技術(shù)分析[嵌入式技術(shù)][安防電子]
發(fā)表于:10/31/2016 7:51:00 PM
四旋翼飛行平臺(tái)控制系統(tǒng)設(shè)計(jì)[嵌入式技術(shù)][航空航天]
發(fā)表于:10/31/2016 2:29:00 PM
基于強(qiáng)獨(dú)特性二進(jìn)制描述子的無人機(jī)目標(biāo)識(shí)別算法[嵌入式技術(shù)][航空航天]
發(fā)表于:10/31/2016 2:19:00 PM
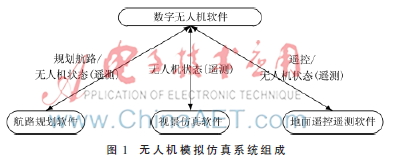
無人機(jī)航路規(guī)劃及視景仿真系統(tǒng)設(shè)計(jì)與實(shí)現(xiàn)[嵌入式技術(shù)][航空航天]
發(fā)表于:10/29/2016 6:07:00 PM
基于GPS定向測(cè)姿系統(tǒng)的研究[模擬設(shè)計(jì)][汽車電子]
發(fā)表于:10/29/2016 5:34:00 PM
基于并行處理技術(shù)的寬帶直擴(kuò)信號(hào)捕獲方法[嵌入式技術(shù)][航空航天]
發(fā)表于:10/29/2016 5:17:00 PM