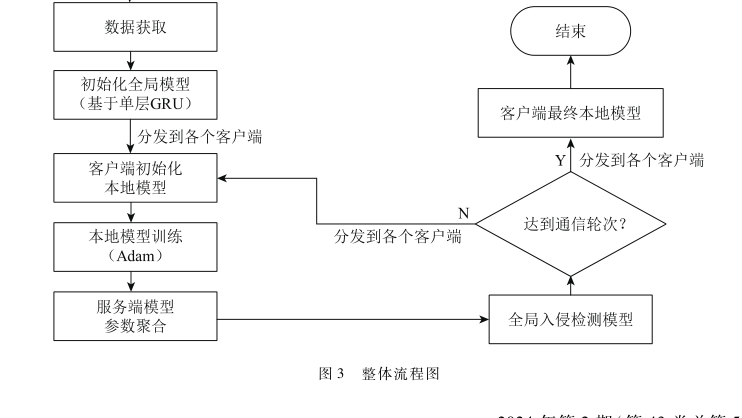
基于GRU-FedAdam的工业物联网入侵检测方法[其他][信息安全]
發(fā)表于:2024/3/7 下午3:00:08

基于机器学习建模的液体火箭发动机喷管内型面优化设计[其他][信息安全]
發(fā)表于:2024/3/7 下午3:00:00

基于攻击意图的工业网络抗毁性评价研究[其他][信息安全]
發(fā)表于:2024/3/7 下午3:00:00

基于无线Mesh自组网煤矿液压支架压力传感器设计与应用[其他][信息安全]
發(fā)表于:2024/3/5 下午2:00:46
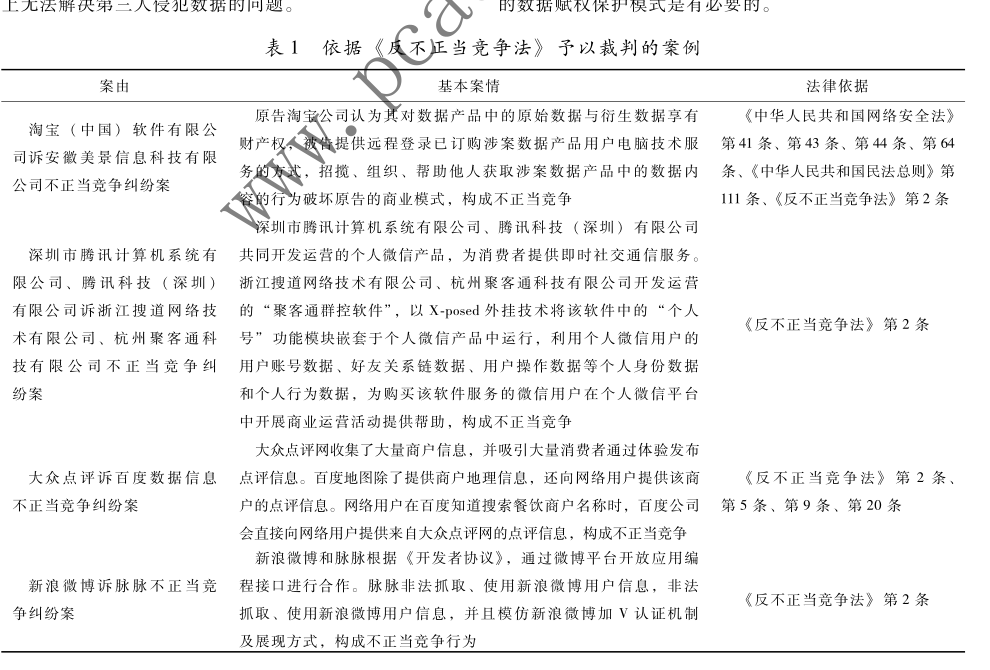
数据财产确权保护的法理逻辑与规则展开[其他][信息安全]
發(fā)表于:2024/3/5 下午2:00:36
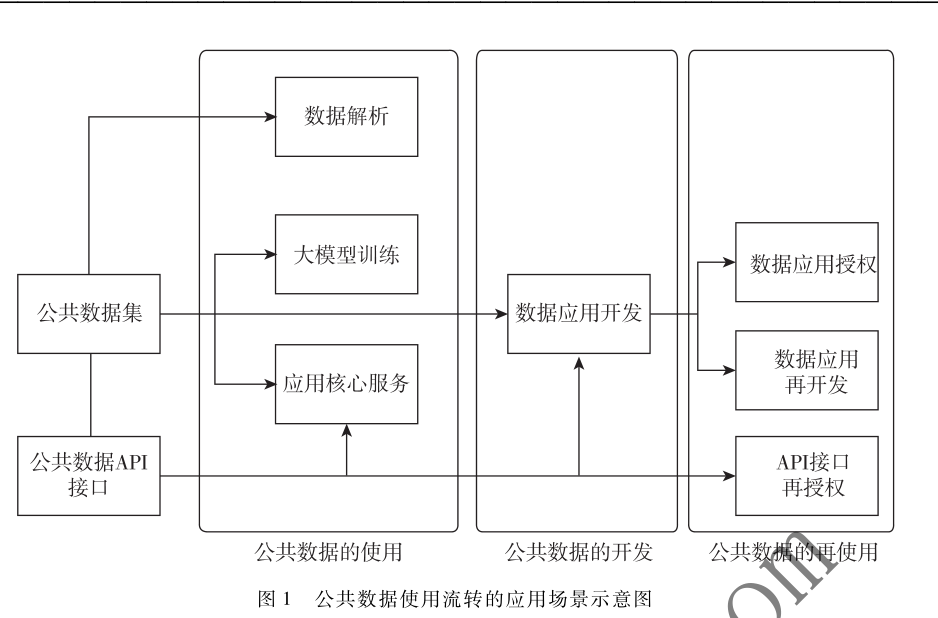
公共数据授权运营分级标准构建[其他][信息安全]
發(fā)表于:2024/3/5 下午2:00:34