生成式人工智能数据跨境流动的法律风险与规制路径[人工智能][其他]
發(fā)表于:2026/3/27 下午4:04:02
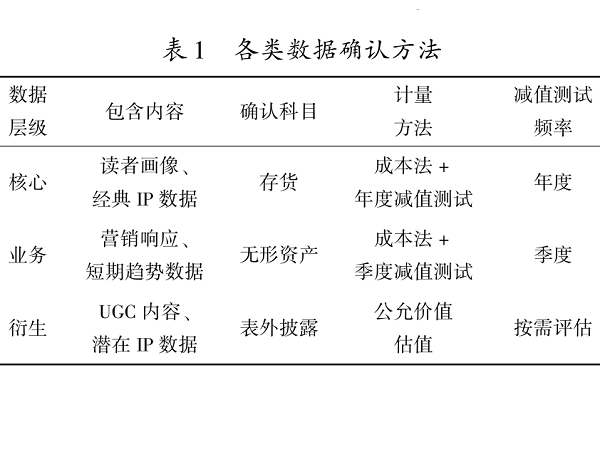
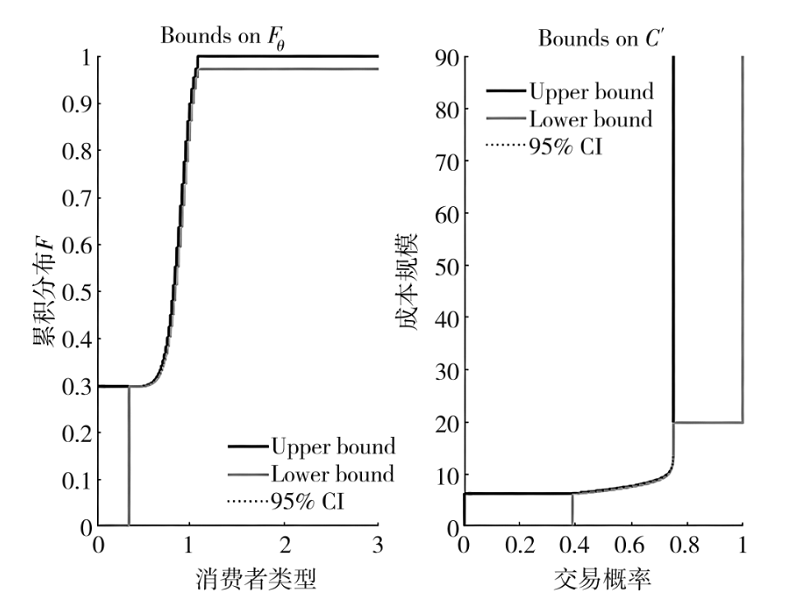
从数据到价值:文化产业数据资产入表实践研究[其他][其他]
發(fā)表于:2026/3/27 下午3:55:45
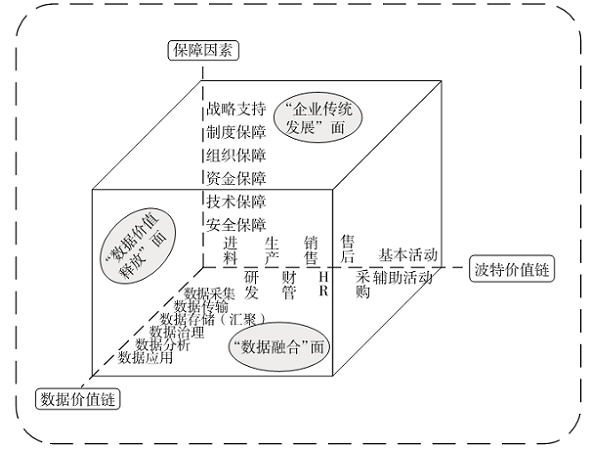
“双链”融合激活中小企业数据要素价值架构与路线研究[其他][其他]
發(fā)表于:2026/3/27 下午2:58:53
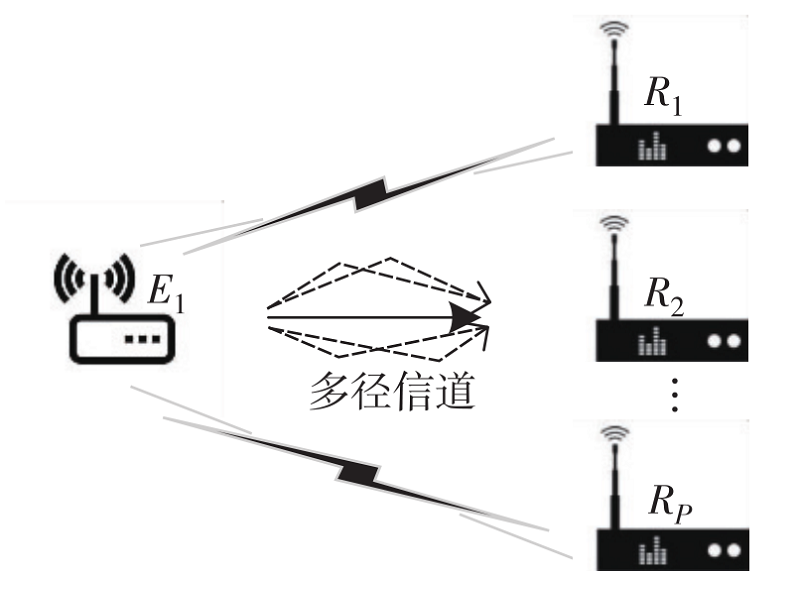
CFR-JVMD与多接收机协作的OFDM辐射源个体识别[通信与网络][通信网络]
發(fā)表于:2026/3/25 下午5:12:41
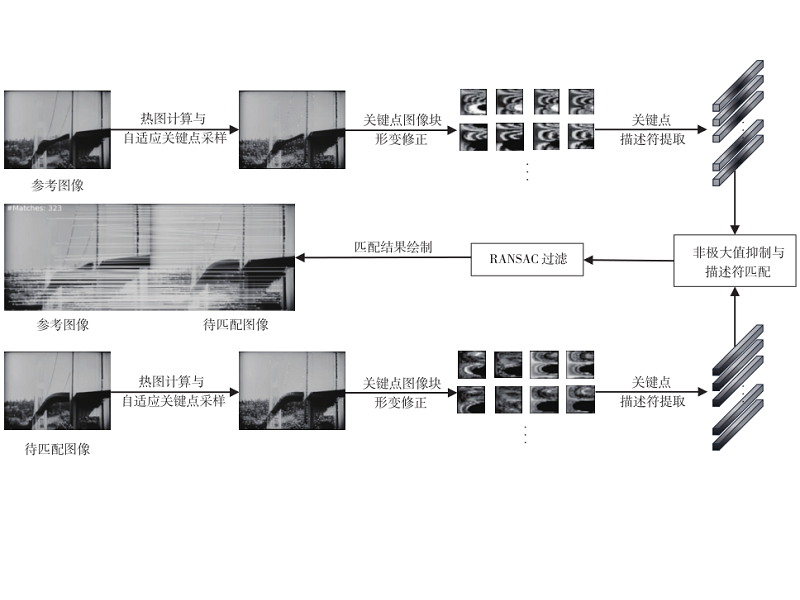
面向非刚性形变图像的关键点匹配方法[人工智能][其他]
發(fā)表于:2026/3/25 下午4:44:44
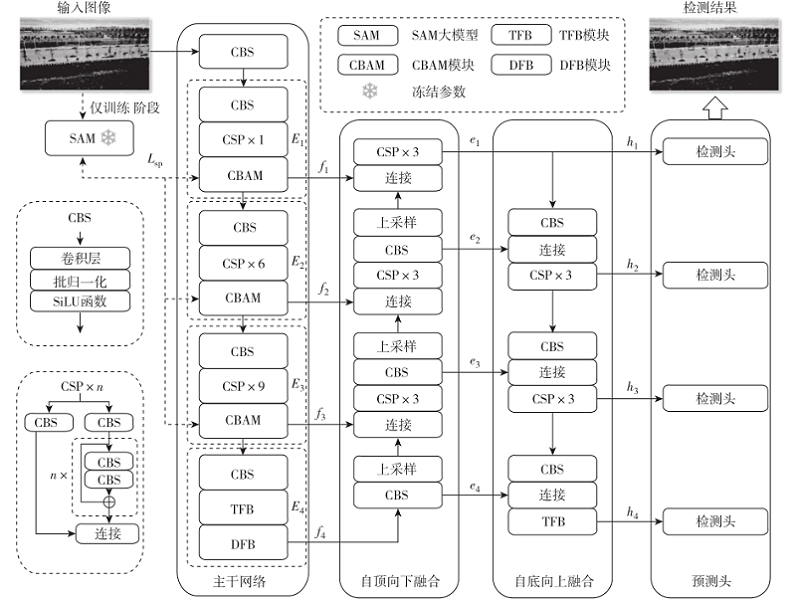
基于多尺度特征融合和SAM引导的无人机小尺度目标检测[人工智能][航空航天]
發(fā)表于:2026/3/25 下午4:35:46
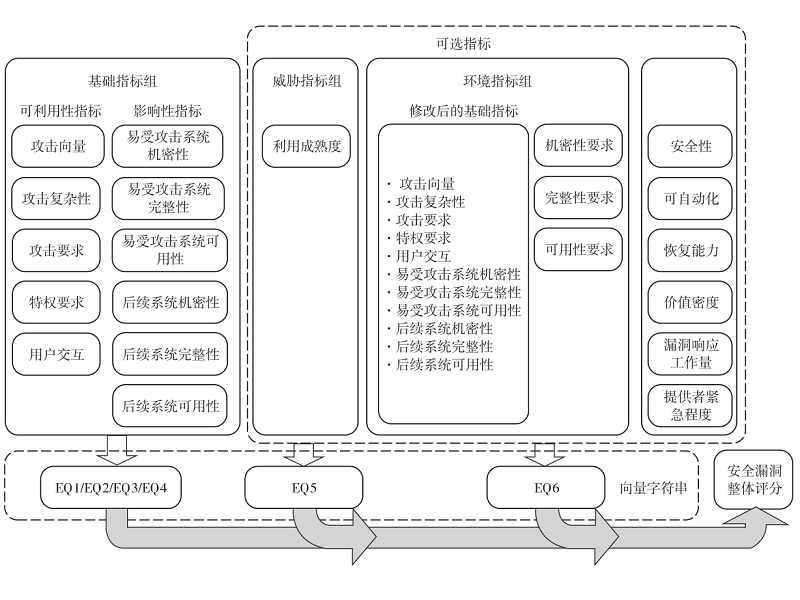
面向攻击面收敛的网络安全风险治理研究[通信与网络][信息安全]
發(fā)表于:2026/3/25 下午4:27:49
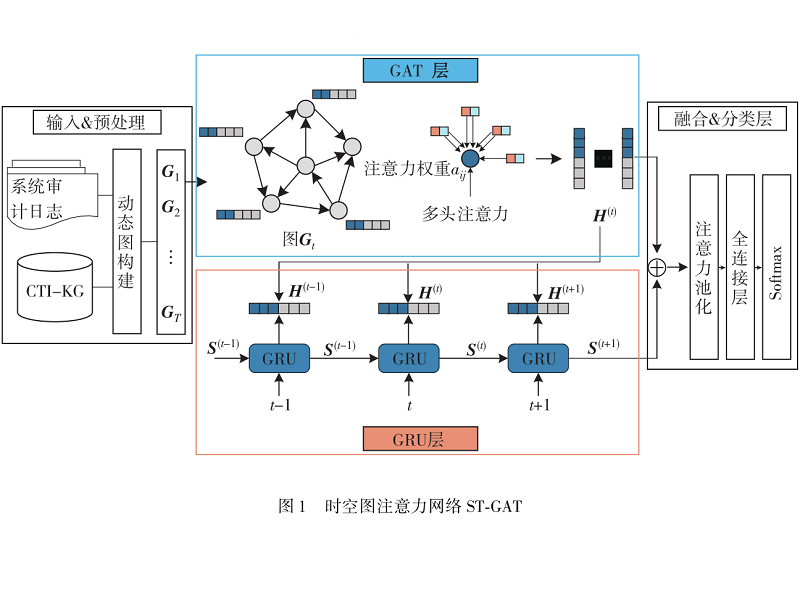
融合溯源图与知识图谱的APT攻击检测模型研究[通信与网络][信息安全]
發(fā)表于:2026/3/25 下午4:19:42