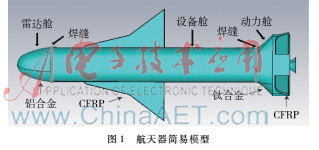
航天器静电放电仿真研究[模拟设计][汽车电子]
發(fā)表于:2017/6/9 下午10:43:00
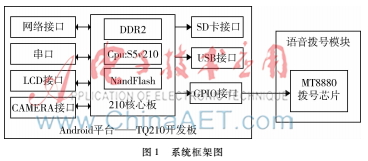
基于Android电话拨号功能的驱动设计[嵌入式技术][其他]
發(fā)表于:2017/6/9 下午10:20:00
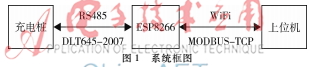
一种改进的高精度超声波液位测量方法的研究[嵌入式技术][其他]
發(fā)表于:2017/6/9 下午9:49:00

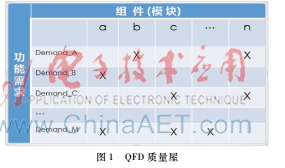
基于QFD和DSM的软件需求变更影响分析方法与应用[通信与网络][工业自动化]
發(fā)表于:2017/6/8 下午11:07:00