
基于MM908E625和Low-G的汽车驾驶状态(疲劳驾驶)监控
张华 吴欣
摘要: 通过采用最先进的测试技术,结合嵌入式计算机、网络技术的应用,智能控制技术,对汽车疲劳驾驶状态进行监控,达到减少因疲劳驾驶造成的道路交通事故的目的。
Abstract:
Key words :
我國(guó)新的《道路交通法》中,為維護(hù)道路交通安全,也明文規(guī)定了對(duì)駕駛速度、連續(xù)駕駛時(shí)間等。國(guó)外一些交通運(yùn)輸發(fā)達(dá)國(guó)家也制定這方面的國(guó)家統(tǒng)一法規(guī)。疲勞駕駛是公路汽車駕駛特別是高速公路上的“隱形殺手”,據(jù)相關(guān)統(tǒng)計(jì),從交通事故的大量案例分析中得出的結(jié)論認(rèn)為:開(kāi)車人因疲勞駕駛所造成的道路交通事故約占交通事故總數(shù)的20%。而疲勞駕駛在死亡交通事故的原因中卻占22%-30%,在死亡交通事故的原因中居首位,由此可想疲勞駕駛對(duì)道路交通安全的危害性。
除法規(guī)建設(shè)外,國(guó)內(nèi)外的汽車廠商也設(shè)計(jì)出各種儀器設(shè)備用于疲勞駕駛link" href="http://ihrv.cn/tags/監(jiān)控" title="監(jiān)控" target="_blank">監(jiān)控,一種針對(duì)疲勞駕駛的紅外線眼球掃描儀在美國(guó)研制成功,這種眼球掃描儀外形如同一個(gè)小型攝像機(jī),使用也很方便,只要把它安裝在儀表盤上,讓鏡頭對(duì)準(zhǔn)司機(jī),掃描儀就會(huì)連續(xù)發(fā)出紅外線信號(hào)來(lái)掃描司機(jī)眼球中的眼白部分,同時(shí)判斷出疲勞程度并發(fā)出“減速停車”、“休息一下”等警告信號(hào)。雷諾、尼桑等產(chǎn)業(yè)巨頭長(zhǎng)期研發(fā)克服疲勞駕駛一種監(jiān)視系統(tǒng),因理論技術(shù)應(yīng)用缺陷仍無(wú)法商業(yè)推廣。日本豐田公司研制的疲勞報(bào)警裝置,只要駕駛員在操縱轉(zhuǎn)向盤時(shí)有一點(diǎn)遲鈍,或脈搏有一點(diǎn)異常變化,該裝置就能測(cè)出這些反應(yīng),并發(fā)出警告,令座墊振動(dòng)或自動(dòng)剎車。
日本東京大學(xué)研制出的疲勞測(cè)試器,可戴在司機(jī)的手腕上。該測(cè)試器內(nèi)部裝有一小型氧氣電池電極,能測(cè)量司機(jī)汗液中的乳酸、氨和酒精含量,然后通過(guò)小型無(wú)線電發(fā)射器把數(shù)據(jù)傳送到研究中心。研究中心通過(guò)電腦分析,判定司機(jī)的疲勞程度,及時(shí)向司機(jī)發(fā)出警告,避免交通事故的發(fā)生。國(guó)內(nèi)也有可有效預(yù)防駕駛員違章駕駛、遏制重大交通事故的“汽車行駛記錄儀”通過(guò)鑒定的報(bào)道。
以上這些方法因這樣或那樣的問(wèn)題,達(dá)到實(shí)用都存在一定的困難。隨著電子技術(shù)的飛速發(fā)展,通過(guò)采用最先進(jìn)的測(cè)試技術(shù),結(jié)合嵌入式計(jì)算機(jī)、網(wǎng)絡(luò)技術(shù)的應(yīng)用,智能控制技術(shù),對(duì)汽車疲勞駕駛狀態(tài)進(jìn)行監(jiān)控,達(dá)到減少因疲勞駕駛造成的道路交通事故的目的。
設(shè)計(jì)概述
本設(shè)計(jì)的目標(biāo)是應(yīng)用現(xiàn)代電子技術(shù)的最新發(fā)展成果,用Motorola公司為第五屆嵌入式微處理器“Freescale杯”提供的芯片和傳感器,設(shè)計(jì)基于MM908E625和Low-G的汽車駕駛狀態(tài)(疲勞駕駛)監(jiān)控儀。
監(jiān)控儀特性:
1.方向盤的轉(zhuǎn)向軸、油門踏板和剎車踏板多點(diǎn)監(jiān)控。
2.加速度傳感器信號(hào)獨(dú)立處理,確保實(shí)時(shí)性。
3.LIN總線網(wǎng)絡(luò),實(shí)現(xiàn)汽車中的分布式電子系統(tǒng)控制。
4.互動(dòng)平臺(tái):駕駛路況選擇,更有利于控制系統(tǒng)監(jiān)控。提供聲光、震動(dòng)報(bào)警提示。
5.大容量數(shù)據(jù)存儲(chǔ)和采集,大屏幕LCD顯示,異動(dòng)駕駛時(shí)間段數(shù)據(jù)查詢。
6.神經(jīng)元網(wǎng)絡(luò)技術(shù)、模糊控制和專家系統(tǒng)。
汽車駕駛狀態(tài)(疲勞駕駛)監(jiān)控儀的基本思路是當(dāng)駕駛員正常駕駛、短距離駕駛、短時(shí)間駕駛時(shí),沒(méi)有疲勞駕駛問(wèn)題,這時(shí)監(jiān)控儀的工作是對(duì)駕駛員的駕駛習(xí)慣進(jìn)行數(shù)據(jù)搜集,建立駕駛習(xí)慣數(shù)學(xué)模型,并根據(jù)不斷采集的數(shù)據(jù)進(jìn)行修正。
隨著連續(xù)駕駛時(shí)間的增加,監(jiān)控儀自動(dòng)進(jìn)入疲勞駕駛監(jiān)控狀態(tài),如果駕駛員有疲勞癥狀,必然會(huì)反映出與正常駕駛不同的偏差。如:突然急剎車的頻率增加、連續(xù)大油門時(shí)的方向盤突然轉(zhuǎn)向,油門踏板的平穩(wěn)性變化等。結(jié)合神經(jīng)元網(wǎng)絡(luò)技術(shù)、模糊控制和專家系統(tǒng),組成對(duì)駕駛員的駕駛狀態(tài)的監(jiān)控,增加與駕駛員的互動(dòng)平臺(tái),向駕駛員提出駕駛指示、報(bào)警等。本人已在自己的自動(dòng)波車上作過(guò)一些嘗試,并取得成果。
加速度傳感器Low-G分別被安裝在方向盤的轉(zhuǎn)向軸、油門踏板和剎車踏板上,由MCU/DSP嵌入式微處理器MM908E625對(duì)傳感器的信號(hào)進(jìn)行處理,并組成LIN總線網(wǎng)絡(luò)。
傳感器除了采用加速度傳感器Low-G外,還需要速度和位置傳感器。
硬件描述
1.硬件系統(tǒng)構(gòu)成:
系統(tǒng)主節(jié)點(diǎn)為嵌入式PC機(jī),配置PIII處理器、觸摸屏提供交互式界面,主節(jié)點(diǎn)PC機(jī)完成數(shù)據(jù)庫(kù)的建立、更新,智能控制程序運(yùn)行和對(duì)LIN子節(jié)點(diǎn)的通訊管理。交互式界面提供路段、路況、測(cè)控時(shí)間等選擇,對(duì)駕駛狀態(tài)的等級(jí)提示和報(bào)警等。
主節(jié)點(diǎn)經(jīng)過(guò)LIN接口板連接到四個(gè)LIN子節(jié)點(diǎn),LIN子節(jié)點(diǎn)以MM908E625為核心,對(duì)加速度、發(fā)動(dòng)機(jī)轉(zhuǎn)速、車速、節(jié)氣門開(kāi)度和制動(dòng)踏板位置等物理量進(jìn)行檢測(cè)和信號(hào)預(yù)處理,其中第一、二、三子節(jié)點(diǎn)對(duì)方向盤的轉(zhuǎn)向軸、油門踏板和剎車踏板加速度傳感器Low-G信號(hào)獨(dú)立處理。第四個(gè)LIN子節(jié)點(diǎn)對(duì)發(fā)動(dòng)機(jī)轉(zhuǎn)速、車速、節(jié)氣門開(kāi)度和制動(dòng)踏板位置,發(fā)動(dòng)機(jī)轉(zhuǎn)速、車速采用霍爾脈沖式傳感器,節(jié)氣門開(kāi)度、制動(dòng)踏板位置采用霍爾線性傳感器。
實(shí)驗(yàn)表明:加速度信號(hào)更能反映汽車駕駛者在正常駕駛和疲勞駕駛時(shí),對(duì)車輛的方向盤的轉(zhuǎn)向軸、油門踏板和剎車踏板這三個(gè)關(guān)鍵部件的操控效果的不同,正常駕駛時(shí)加速度信號(hào)的輸出電壓在中心點(diǎn)電壓±0.5V變化,而疲勞駕駛時(shí)加速度信號(hào)的輸出電壓在中心點(diǎn)電壓±1V變化,且加速度信號(hào)變化的頻度大于正常駕駛的情況。
第四個(gè)LIN子節(jié)點(diǎn)的測(cè)量信號(hào)作為模糊控制器的輸入限定條件。
硬件系統(tǒng)結(jié)構(gòu)框圖如圖(1)所示:

圖(1)硬件系統(tǒng)結(jié)構(gòu)框圖
2.加速度計(jì)LIN子節(jié)點(diǎn):
(1). 速度計(jì)LIN子節(jié)點(diǎn)原理圖(2)及加速度測(cè)量模塊圖(3):
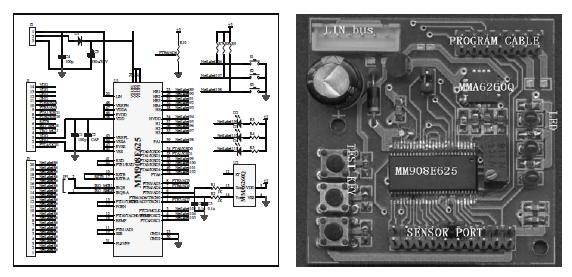
圖(2)LIN子節(jié)點(diǎn)原理圖 圖(3)測(cè)量模塊
(2). 加速度計(jì)LIN子節(jié)點(diǎn)的設(shè)計(jì)及結(jié)構(gòu)安裝:
MMA6260Q為XY雙軸向傳感器,為保證獲得較理想的加速度測(cè)量,加速度計(jì)設(shè)計(jì)成帶LIN接口,物理尺寸為5X5X2CM的測(cè)量模塊,直接安裝在油門開(kāi)度踏板、制動(dòng)踏板和方向轉(zhuǎn)軸上。油門開(kāi)度踏板和制動(dòng)踏板測(cè)量模塊垂直安裝,確保X軸方向可測(cè)量踏板的加速度信號(hào),Y軸方向測(cè)量車輛運(yùn)行中平均震動(dòng)信號(hào)。方向轉(zhuǎn)軸測(cè)量模塊水平安裝,確保XY軸方向可測(cè)量方向盤轉(zhuǎn)向的加速度信號(hào)。
3.傳感器簡(jiǎn)介:
除用于加速度測(cè)量的Low-G外,還有以下傳感器。
節(jié)氣門(油門)開(kāi)度傳感器:節(jié)氣門由駕駛員操縱,直接反映駕駛員的控制意圖,因此是判斷發(fā)動(dòng)機(jī)工況的重要信號(hào)。節(jié)氣門位置傳感器安裝在節(jié)氣門軸的尾端,采用霍爾線性傳感器。經(jīng)傳感器信號(hào)調(diào)理板處理后,由LIN子節(jié)點(diǎn)測(cè)量模塊檢測(cè)搜企網(wǎng),節(jié)氣門完全關(guān)閉時(shí),傳感器輸出電壓等于0V;節(jié)氣門完全打開(kāi)時(shí),輸出電壓等于5V。當(dāng)節(jié)氣門不斷開(kāi)大時(shí),其輸出電壓隨之線形增加。
發(fā)動(dòng)機(jī)轉(zhuǎn)速、車速傳感器:采用霍爾脈沖式。經(jīng)傳感器信號(hào)調(diào)理板脈沖整形電路處理之后,由主芯片的輸入捕捉口進(jìn)行脈沖捕捉。對(duì)應(yīng)發(fā)動(dòng)機(jī)轉(zhuǎn)速1500rpm-8000rpm的范圍,接口板輸出對(duì)應(yīng)0V-5V變化。對(duì)應(yīng)車速60KM/h-180KM/h的范圍,接口板輸出對(duì)應(yīng)0V-5V變化。
智能控制(模糊控制器)設(shè)計(jì)
汽車駕駛狀態(tài)(疲勞駕駛)監(jiān)控的對(duì)象是相當(dāng)復(fù)雜的系統(tǒng)控制問(wèn)題,是屬于多輸入-多輸出的模糊控制系統(tǒng)范疇。人的駕駛習(xí)慣,不同的路況,不同駕駛時(shí)段反映到對(duì)車輛的操控,會(huì)產(chǎn)生相當(dāng)不同的汽車駕駛狀態(tài)。
各種對(duì)車輛的操控,作為輸入量,表現(xiàn)為節(jié)氣門(油門)開(kāi)度、制動(dòng)踏板的位置、發(fā)動(dòng)機(jī)轉(zhuǎn)速、車速的變化、速度的變化(即加速度),方向盤轉(zhuǎn)向的角度和角加速度等。車輛在不同的路況下產(chǎn)生的震動(dòng)作為輸入量,也會(huì)影響到傳感器的測(cè)量,特別是對(duì)加速度傳感器的影響,對(duì)震動(dòng)信號(hào)由LIN子節(jié)點(diǎn)測(cè)量模塊按“平均震動(dòng)信號(hào)強(qiáng)度”在信號(hào)預(yù)處理程序中減弱或消除。作為輸出量,表現(xiàn)為對(duì)車輛的駕駛狀態(tài)的優(yōu)劣,分為“好”、“中”、“差”三個(gè)等級(jí)。在設(shè)計(jì)控制規(guī)則庫(kù)時(shí),把多輸入-多輸出模糊控制結(jié)構(gòu)化為多輸入-單輸出模糊控制結(jié)構(gòu),然后按單輸入-單輸出模糊控制系統(tǒng)的方法設(shè)計(jì),實(shí)現(xiàn)多變量控制系統(tǒng)的模糊解耦。
實(shí)驗(yàn)數(shù)據(jù)表明,疲勞駕駛階段,反映到汽車駕駛狀態(tài)上,表現(xiàn)為對(duì)節(jié)氣門(油門)開(kāi)度、制動(dòng)踏板和方向盤轉(zhuǎn)向的加速度信號(hào)的改變比正常駕駛時(shí)期的加速度信號(hào)的改變?cè)谛盘?hào)的幅值和頻度有明顯的不同。本課題采用FreeScale的Low-G系列雙軸向加速度傳感器MMA6260Q,對(duì)所需的加速度信號(hào)能準(zhǔn)確地、實(shí)時(shí)地采集,作為模糊控制器的輸入變量的一個(gè)重要參數(shù)。
本研究課題早期對(duì)疲勞駕駛的研究主要通過(guò)測(cè)量油門開(kāi)度、制動(dòng)踏板位置和發(fā)動(dòng)機(jī)轉(zhuǎn)速、車速的變化等參數(shù),這些參數(shù)間接地、滯后地反映駕駛狀態(tài)的變化,這些參數(shù)可作為模糊控制器在各種不同駕駛狀態(tài)的限定條件,結(jié)合加速度的測(cè)量,建立模糊控制規(guī)則。
對(duì)應(yīng)于油門開(kāi)度、制動(dòng)踏板位置和方向盤轉(zhuǎn)向軸三種類型的變量建立三套模糊控制器模型,以下以油門開(kāi)度作為變量說(shuō)明模糊控制器的設(shè)計(jì)。
1.糊化過(guò)程:
設(shè)油門開(kāi)度模糊控制的輸入量分別為油門開(kāi)度s,發(fā)動(dòng)機(jī)轉(zhuǎn)速n、車速v和油門開(kāi)度加速度a。將加速度劃分成“負(fù)大NB”、“負(fù)小NS”、“零ZE”、“正小PS”、“正大PB”五個(gè)等級(jí)(即五個(gè)模糊子集)??刂破鞯妮敵鰹閷?duì)車輛的駕駛狀態(tài)的優(yōu)劣(以H表示),分為“好GOOD”、“中MIDDLE”、“差BAD”三個(gè)等級(jí)。為了實(shí)現(xiàn)模糊化,確定油門開(kāi)度加速度a模糊子集的隸屬度函數(shù)如下圖(4)所示。為了按照一定的語(yǔ)言規(guī)則進(jìn)行模糊推理,確定輸出量即反映駕駛狀態(tài)的優(yōu)劣的隸屬度函數(shù)如下圖(5)所示。
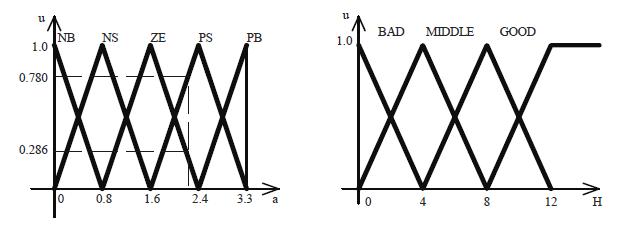
圖(4)加速度a隸屬度函數(shù)圖 圖(5)駕駛狀態(tài)隸屬度函數(shù)圖
2.模糊控制規(guī)則的建立
對(duì)應(yīng)于油門開(kāi)度模糊控制規(guī)則庫(kù)的建立,與油門開(kāi)度s,發(fā)動(dòng)機(jī)轉(zhuǎn)速n、車速v在不同的數(shù)值范圍的取值具有交互性和關(guān)聯(lián)性。規(guī)則庫(kù)的建立需要在程序運(yùn)行中不斷搜集數(shù)據(jù),通過(guò)自學(xué)習(xí)確定方法和模糊規(guī)則的自調(diào)整,在實(shí)驗(yàn)過(guò)程中不斷修正和完善。
模糊控制規(guī)則重點(diǎn)處理影響車輛駕駛狀態(tài)的優(yōu)劣“差”和“中”的工作過(guò)程。其中,“差”駕駛狀態(tài)的規(guī)則對(duì)應(yīng)于油門開(kāi)度s分為0,1,2-9共十段,發(fā)動(dòng)機(jī)轉(zhuǎn)速n分為1000rpn、1500rpn-5500rpm共十段,車速v分為60km/h、70km/h-150km/h共十段,和加速度劃分成“負(fù)大NB”、“負(fù)小NS”、“零ZE”、“正小PS”、“正大PB”五個(gè)等級(jí),可歸納為有效控制規(guī)則八十六條規(guī)則。
模糊控制規(guī)則(L)公式:如果(IF)油門開(kāi)度s為x段[和(AND)]V[或(OR)]發(fā)動(dòng)機(jī)轉(zhuǎn)速n為y段[和(AND)]V[或(OR)]車速v為z段,且加速度為等級(jí)m,則(THEN)駕駛狀態(tài)為“S”。
3.精確化計(jì)算
對(duì)應(yīng)于上述推理方法得到的結(jié)果,結(jié)合車輛正常駕駛時(shí)采集的數(shù)據(jù)建立的數(shù)據(jù)庫(kù)分析,對(duì)加速度等級(jí)出現(xiàn)的頻度,根據(jù)輸出模糊子集的隸屬度函數(shù)進(jìn)行精確化計(jì)算,確定車輛駕駛狀態(tài)的優(yōu)劣“差”和“中”,由交互界面提供操作提示和報(bào)警。
軟件描述
1.數(shù)據(jù)庫(kù)建立:
駕駛狀態(tài)模糊控制器數(shù)據(jù)庫(kù)的建立和數(shù)據(jù)更新是本課題設(shè)計(jì)的重要部分SOOQ.cn版權(quán)所有,汽車正常駕駛時(shí),系統(tǒng)設(shè)定為連續(xù)駕駛的前兩個(gè)小時(shí)為正常駕駛,在這段時(shí)間內(nèi)監(jiān)控儀的工作是對(duì)駕駛員的駕駛習(xí)慣進(jìn)行數(shù)據(jù)搜集,按設(shè)定量化等級(jí)作數(shù)據(jù)的線性化量化,對(duì)應(yīng)于油門開(kāi)度、制動(dòng)踏板位置和方向盤轉(zhuǎn)向軸三種類型的變量的不同量綱,按比例因子對(duì)數(shù)據(jù)處理,依據(jù)模糊子集的隸屬度函數(shù)模糊化數(shù)據(jù)。
為了消除大的誤差,在量化級(jí)之間采用插值運(yùn)算,引入權(quán)系數(shù)因子w(.),對(duì)于任意一個(gè)連續(xù)的測(cè)量值通過(guò)相鄰的兩個(gè)離散的加權(quán)運(yùn)算得到模糊度的值。在模糊化數(shù)據(jù)建立數(shù)據(jù)庫(kù)的基礎(chǔ)上,生成正常駕駛習(xí)慣數(shù)學(xué)模型,并根據(jù)不斷采集的數(shù)據(jù)進(jìn)行修正。隨著連續(xù)駕駛時(shí)間的增加(大于兩個(gè)小時(shí)或采集數(shù)據(jù)的變化超出駕駛狀態(tài)監(jiān)控指標(biāo)),監(jiān)控儀自動(dòng)進(jìn)入疲勞駕駛監(jiān)控狀態(tài)。
2.軟件框圖
(1).PC機(jī)程序設(shè)計(jì):
PC機(jī)程序用C語(yǔ)言編寫,完成數(shù)據(jù)庫(kù)的建立和維護(hù)、對(duì)LIN-BUS網(wǎng)絡(luò)的管理、模糊控制器算法和規(guī)則的運(yùn)算、交互界面的輸入輸出控制。軟件框圖如圖(6)所示。
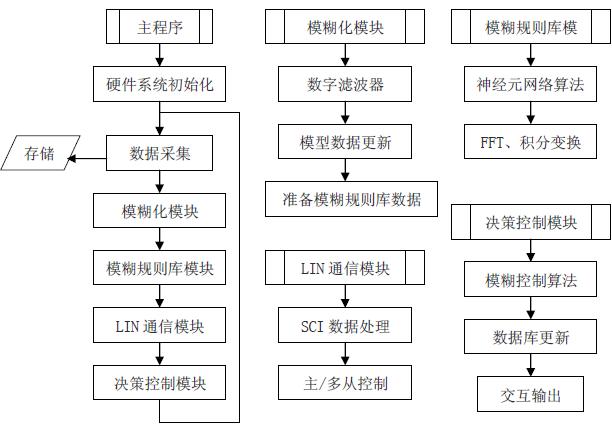
圖(6)PC機(jī)軟件框圖
(2).測(cè)量模塊程序設(shè)計(jì):
測(cè)量模塊是以MM908E625單片機(jī)為核心的數(shù)據(jù)采集器,程序用CodeWarrior3.1CW-HC083.0設(shè)計(jì),測(cè)量模塊軟件框圖如圖(7)所示。
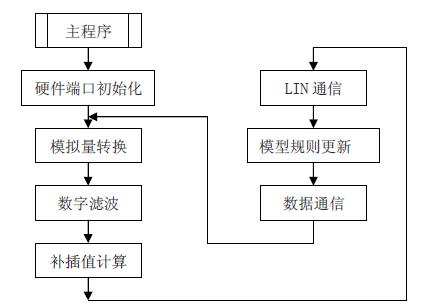
圖(7)測(cè)量模塊軟件框圖
結(jié)論
智能控制技術(shù)應(yīng)用于汽車疲勞駕駛監(jiān)控課題是一個(gè)相當(dāng)復(fù)雜和具有相當(dāng)難度的研究方向,通過(guò)對(duì)LIN-BUS網(wǎng)絡(luò)的研究,以MM908E625、Low-G加速度傳感器和其他傳感器與嵌入式PC機(jī)建立起這樣一個(gè)硬件平臺(tái),實(shí)現(xiàn)對(duì)汽車駕駛狀態(tài)在正常駕駛、短距離駕駛、短時(shí)間駕駛的數(shù)據(jù)庫(kù)的建立,規(guī)則庫(kù)數(shù)據(jù)的修正,疲勞駕駛狀態(tài)監(jiān)控。對(duì)油門開(kāi)度、制動(dòng)踏板位置和方向盤轉(zhuǎn)向軸等三種主要影響駕駛狀態(tài)的因數(shù),設(shè)計(jì)出模糊控制器,從理論和硬件實(shí)現(xiàn)兩方面做了有益的探討,雖然離實(shí)際應(yīng)用和產(chǎn)業(yè)化有一定的距離,但是為進(jìn)一步完善該系統(tǒng)的設(shè)計(jì)打下了良好的基礎(chǔ)。
此內(nèi)容為AET網(wǎng)站原創(chuàng),未經(jīng)授權(quán)禁止轉(zhuǎn)載。