
基于DSP仿人机器人关节控制器设计
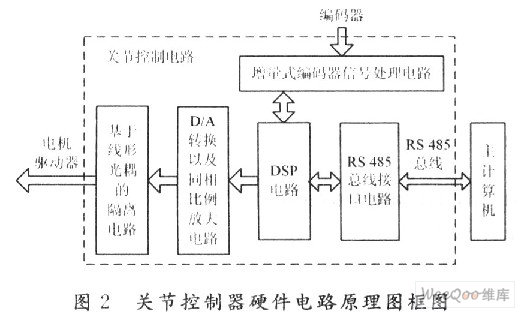
摘要: 该设计选用TI公司的2000系列DSP TMS320F240作为控制单元。其时钟频率可达20 MHz,具有高速的处理能力,片内资源丰富,特别是它特有的内置事件管理器模块,使其在电机控制领域具有非常广泛的应用。该芯片本身尺寸很小,需要外扩的资源不多,节省了电路板的空间。关节控制器硬件电路原理图框图如图2所示。
Abstract:
Key words :
仿人title="機(jī)器人">機(jī)器人具有可移動(dòng)性,具有很多的自由度,包括雙臂、頸部、腰部、雙腿等,可以完成更復(fù)雜的任務(wù),這些關(guān)節(jié)要連接在一起,進(jìn)行統(tǒng)一的協(xié)調(diào)控制,就對(duì)控制系統(tǒng)的可靠性、實(shí)時(shí)性提出了更高的要求,以往采用的集中控制系統(tǒng),控制功能高度集中。局部的故障就可能造成系統(tǒng)的整體失效,降低了系統(tǒng)的可靠性和穩(wěn)定性,因此考慮采用分布式的控制系統(tǒng)來(lái)實(shí)現(xiàn)系統(tǒng)的控制功能。
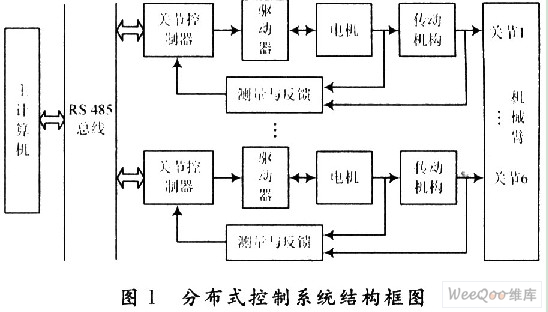
考慮到機(jī)械臂控制系統(tǒng)控制算法的計(jì)算量以及多軸協(xié)調(diào)控制等問(wèn)題,采用基于RS 485總線的分布式控制的體系結(jié)構(gòu),見(jiàn)圖1所示。運(yùn)動(dòng)規(guī)劃算法由主計(jì)算機(jī)來(lái)實(shí)現(xiàn),同時(shí)主計(jì)算機(jī)還將通過(guò)RS 485總線與各關(guān)節(jié)控制器通信,負(fù)責(zé)各關(guān)節(jié)控制器的協(xié)調(diào)工作。每個(gè)關(guān)節(jié)控制器和一臺(tái)電機(jī)、驅(qū)動(dòng)器、檢測(cè)反饋裝置等構(gòu)成一個(gè)位置伺服系統(tǒng),負(fù)責(zé)機(jī)械臂某一個(gè)關(guān)節(jié)變量的具體控制任務(wù)。
1 仿人機(jī)器人分布式控制器的硬件設(shè)計(jì)
1.1 關(guān)節(jié)控制器硬件電路設(shè)計(jì)
該設(shè)計(jì)選用TI公司的2000系列DSPTMS320F240作為控制單元。其時(shí)鐘頻率可達(dá)20 MHz,具有高速的處理能力,片內(nèi)資源豐富,特別是它特有的內(nèi)置事件管理器模塊,使其在電機(jī)控制領(lǐng)域具有非常廣泛的應(yīng)用。該芯片本身尺寸很小,需要外擴(kuò)的資源不多,節(jié)省了電路板的空間。關(guān)節(jié)控制器硬件電路原理圖框圖如圖2所示。
1.2 電機(jī)驅(qū)動(dòng)器的接口電路
驅(qū)動(dòng)器的控制模式可以分為兩種:速度控制模式和位置控制模式(通常用電位器作為電機(jī)的位置傳感器)。這里采用它的速度控制模式,輸入的指令信號(hào)是0~10 V的模擬量。因此需要用D/A轉(zhuǎn)換電路,把DSP輸出的數(shù)字量給定轉(zhuǎn)變?yōu)槟M信號(hào),電路圖如圖3所示。DAC7621為12 b并行輸入的D/A轉(zhuǎn)換器,它內(nèi)置參考源,輸出范圍:0~4.095 V。它的12位輸入接DSP數(shù)據(jù)總線中的D0到D11。它的片選輸入管腳可以接DSP的I/O控制線/IS。為了得到0~10 V的模擬信號(hào),還要利用LM358中的一片運(yùn)算放大器構(gòu)成的同相比例放大電路,把0~4.095 V的信號(hào)放大2.5倍。

如果驅(qū)動(dòng)和控制器不進(jìn)行隔離,尖峰將破壞控制器電路中的器件,例如RAM。因此,設(shè)計(jì)了基于線形光耦HCNR201的隔離電路,如圖4所示。
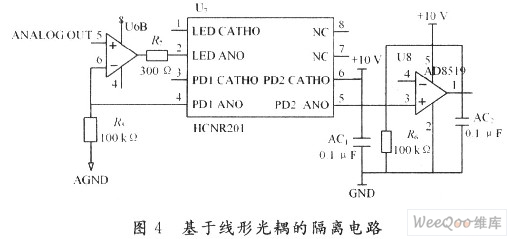
線形光耦HCNR201只能起到隔離電流的關(guān)系,且輸入電流和輸出電流呈線性關(guān)系。U6B是圖3芯片LM358中的另外一片運(yùn)算放大器,它將輸入0~10 V電壓轉(zhuǎn)換成20 mA以內(nèi)的電流信號(hào),輸入線形光耦HC-NR201。HCNR201輸出電流再經(jīng)過(guò)一個(gè)由單電源軌到軌運(yùn)放AD8519構(gòu)成的電壓跟隨器轉(zhuǎn)換成0~10 V電壓信號(hào),作為驅(qū)動(dòng)器的模擬信號(hào)輸入。顯然,HCNR201兩側(cè)電路應(yīng)采用不同的電源和地。LM358中的兩片運(yùn)算放大器采用控制器輸入的12 V電源供電,而AD8519則采用驅(qū)動(dòng)器輸入端提供的10 V電壓供電。
1.3 增量式編碼器信號(hào)處理電路
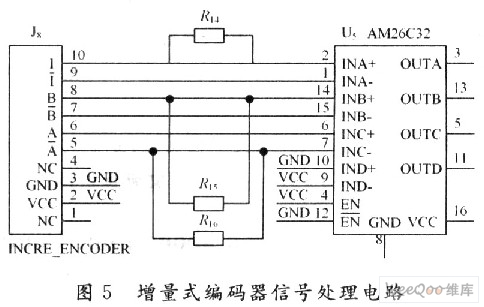
增量式編碼器信號(hào)處理電路如圖5所示。J8是MR編碼器的信號(hào)輸入接口,采用AM26C32把MR編碼器輸出三個(gè)通道的RS 422差分信號(hào)轉(zhuǎn)換成TTL電平,得到A,B,Z三路信號(hào)。
1.4 RS 485總線通信電路
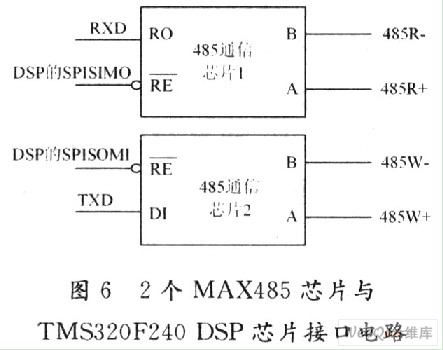
RS 485總線是一種通信總線,TMS320F240 DSP芯片本身不具備RS 485總線接口,采用兩個(gè)485通信芯片MAX485可以的把TMS320F240的串口RXD和TXD的TTL電平轉(zhuǎn)換為RS 485電平,TMS320F240DSP的RXD和TXD引腳分別連接到第一片485通信芯片RO和第2片485通信芯片DI的引腳。TMS320F240 DSP 的SPISIMO和SPISOMI連接到MAX485的使能引腳RE,用于控制TMS320F240 DSP芯片的數(shù)據(jù)發(fā)送口掛接到總線上或和總線分離,電路如圖6所示。
2 仿人機(jī)器人控制器的軟件設(shè)計(jì)
2.1 關(guān)節(jié)控制器主程序
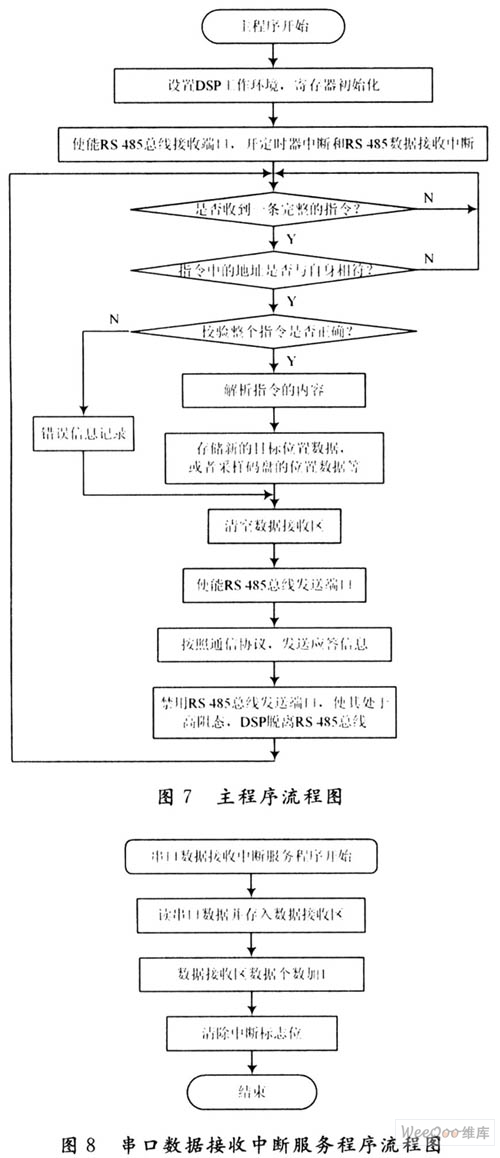
主程序的流程見(jiàn)圖7。
寄存器初始化操作主要包括:設(shè)置CPU CLK為外部晶振的2倍頻,即16 MHz;設(shè)置串口通信波特率為:38.4 Kb/s;設(shè)置定時(shí)器/計(jì)數(shù)器相關(guān)寄存器;設(shè)置QEP電路單元相關(guān)寄存器;設(shè)置中斷控制寄存器等。
2.2 串口數(shù)據(jù)接收中斷服務(wù)程序
串口數(shù)據(jù)接收中斷服務(wù)程序流程圖見(jiàn)圖8。在中斷服務(wù)程序中,讀取數(shù)據(jù)接收寄存器中的數(shù)據(jù),存入數(shù)據(jù)接收區(qū),而并不做任何進(jìn)一步分析和處理。數(shù)據(jù)接收區(qū)是內(nèi)存中暫時(shí)存放數(shù)據(jù)的區(qū)域,當(dāng)存滿一條完整指令信息后,由主程序分析和處理。
2.3 控制周期定時(shí)中斷服務(wù)服務(wù)程序
控制周期2 ms定時(shí)中斷服務(wù)程序的流程見(jiàn)圖9。定時(shí)器/計(jì)數(shù)器為位置環(huán)和速度環(huán)控制周期定時(shí)2 ms,每2 ms進(jìn)入定時(shí)中斷服務(wù)程序1次,讀取位置反饋值和速度反饋值,進(jìn)行積分分離PID運(yùn)算,最后輸出給D/A轉(zhuǎn)換成模擬量。
每一個(gè)插補(bǔ)周期(50 ms),主計(jì)算機(jī)向關(guān)節(jié)控制器發(fā)送1次運(yùn)動(dòng)規(guī)劃后的目標(biāo)位置。該目標(biāo)位置是以增量編碼器信號(hào)四倍頻后的脈沖數(shù)為單位,以前一次的目標(biāo)位置作為脈沖計(jì)數(shù)的零點(diǎn)。因此,關(guān)節(jié)控制器在讀取新的目標(biāo)位置后,也應(yīng)該以前一次的目標(biāo)位置作為新的增量碼盤脈沖計(jì)數(shù)零點(diǎn),測(cè)量實(shí)際的電機(jī)位置,與新的目標(biāo)位置比較、運(yùn)算。主計(jì)算機(jī)根據(jù)需要可以查詢當(dāng)前電機(jī)運(yùn)行的實(shí)際位置,關(guān)節(jié)控制器返回的位置則是關(guān)節(jié)角的絕對(duì)位置,單位是0.1°。
3 結(jié) 語(yǔ)
仿人機(jī)器人機(jī)械臂分布式關(guān)節(jié)控制器研究與設(shè)計(jì),對(duì)于提高仿人機(jī)器人總體性能與人機(jī)交互能力,具有重要科研價(jià)值與現(xiàn)實(shí)意義。機(jī)械臂分布式控制器的高度實(shí)時(shí)性、容錯(cuò)性、可靠性、擴(kuò)充性,為仿人機(jī)器人系統(tǒng)提供了先進(jìn)的網(wǎng)絡(luò)體系結(jié)構(gòu)與通信標(biāo)準(zhǔn),實(shí)踐表明應(yīng)用前景極為廣闊。
此內(nèi)容為AET網(wǎng)站原創(chuàng),未經(jīng)授權(quán)禁止轉(zhuǎn)載。