
采用PIC16F877单片机的汽车电动助力转向系统
唐爱民 赵武 谢刚 张再利
摘要: 整个系统由车载12V蓄电池供电,ECU工作时,扭矩、转角、车速、温度等传感器把采集到的信号经过输入接口电路处理后送至单片机的相应端口, 单片机根据系统助力特性和相应算法对这些数据分析处理,以确定助力电流的大小和方向,并通过单片机的PWM口发出脉冲指令和相应的换向控制端口发出换向指令,通过驱动电路和H桥电路控制直流电动机工作。
Abstract:
Key words :
1 引言
隨著電子控制技術(shù)的發(fā)展及其在汽車領(lǐng)域的廣泛應(yīng)用, 電動(dòng)助力轉(zhuǎn)向系統(tǒng)(Electric Power Steering, 簡(jiǎn)稱EPS)越來(lái)越成為目前汽車電子技術(shù)研究的熱點(diǎn)之一。與傳統(tǒng)的轉(zhuǎn)向系統(tǒng)相比,EPS系統(tǒng)結(jié)構(gòu)簡(jiǎn)單,靈活性大,可以獲得理想的操縱穩(wěn)定性,能動(dòng)態(tài)地適應(yīng)汽車行駛狀況的變化,在操縱舒適性、安全性、環(huán)保、節(jié)能、易于維修等方面也充分顯示了其優(yōu)越性。目前, 電動(dòng)助力轉(zhuǎn)向已部分取代液壓助力轉(zhuǎn)向并獲得廣泛應(yīng)用,如日本的大發(fā)、三菱、本田汽車公司,美國(guó)的Delphi汽車系統(tǒng)公司,德國(guó)的ZF公司等都相繼研制出各自的EPS并裝配使用。國(guó)內(nèi)對(duì)EPS 系統(tǒng)的研究起步較晚,僅有清華、華中科大、吉林大學(xué)、合肥工大等高校開(kāi)展了系統(tǒng)結(jié)構(gòu)的方案設(shè)計(jì)、系統(tǒng)建模和動(dòng)力學(xué)分析等研究,但處在理論探索、實(shí)驗(yàn)研究階段。國(guó)內(nèi)部分汽車廠商如重慶長(zhǎng)安、南昌昌河、東風(fēng)、一汽等與高校聯(lián)合研究,也都處在研制的初級(jí)階段,未達(dá)到實(shí)用程度。
2 EPS系統(tǒng)的硬件組成及工作原理
2.1 EPS的硬件組成
EPS是一種直接依靠電力提供輔助扭矩的動(dòng)力轉(zhuǎn)向系統(tǒng),結(jié)構(gòu)如圖2-1所示,它由電子控制單元(ECU)控制電機(jī)提供助力,系統(tǒng)主要由電子控制單元、扭矩傳感器、轉(zhuǎn)角傳感器、車速傳感器(可與其他系統(tǒng)共用)、直流電機(jī)、離合器、電磁繼電器、減速機(jī)構(gòu)和轉(zhuǎn)向機(jī)構(gòu)等組成。

圖2-1 EPS系統(tǒng)結(jié)構(gòu)圖
2.2 EPS的工作原理
當(dāng)汽車點(diǎn)火開(kāi)關(guān)閉合時(shí),ECU上電開(kāi)始對(duì)EPS系統(tǒng)進(jìn)行自檢,自檢通過(guò)后,閉合繼電器和離合器,EPS系統(tǒng)便開(kāi)始工作,當(dāng)方向盤轉(zhuǎn)動(dòng)時(shí),位于轉(zhuǎn)向軸上的轉(zhuǎn)角傳感器和扭矩傳感器把測(cè)得方向盤上的角位移和作用于其上的力矩傳遞給ECU,ECU根據(jù)這兩個(gè)信號(hào)并結(jié)合車速等信息,控制電機(jī)產(chǎn)生相應(yīng)的助力,實(shí)現(xiàn)在全速范圍內(nèi)最佳控制:在低速行駛時(shí),減輕轉(zhuǎn)向力,保證汽車轉(zhuǎn)向靈活、輕便,在高速行駛時(shí),適當(dāng)增加阻尼控制,保證轉(zhuǎn)向盤操作穩(wěn)重、可靠。
3 基于PIC單片機(jī)的ECU系統(tǒng)設(shè)計(jì)
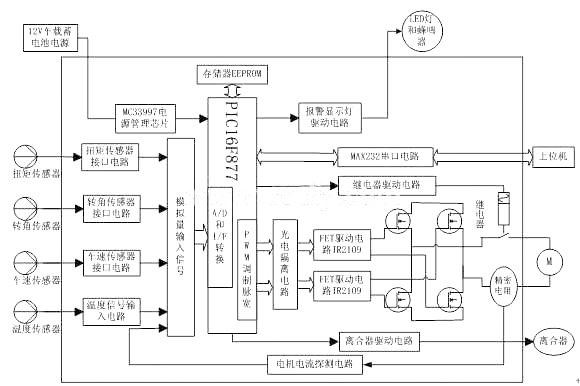
圖3-1 ECU系統(tǒng)結(jié)構(gòu)原理圖
3.1 ECU工作原理
系統(tǒng)的控制核心為PIC16F877單片機(jī),控制單元結(jié)構(gòu)如圖3-1所示。整個(gè)系統(tǒng)由車載12V蓄電池供電,ECU工作時(shí),扭矩、轉(zhuǎn)角、車速、溫度等傳感器把采集到的信號(hào)經(jīng)過(guò)輸入接口電路處理后送至單片機(jī)的相應(yīng)端口, 單片機(jī)根據(jù)系統(tǒng)助力特性和相應(yīng)算法對(duì)這些數(shù)據(jù)分析處理,以確定助力電流的大小和方向,并通過(guò)單片機(jī)的PWM口發(fā)出脈沖指令和相應(yīng)的換向控制端口發(fā)出換向指令,通過(guò)驅(qū)動(dòng)電路和H橋電路控制直流電動(dòng)機(jī)工作。在電動(dòng)機(jī)的驅(qū)動(dòng)電路上設(shè)有電流傳感器,該傳感器把檢測(cè)到的電機(jī)實(shí)際工作電流通過(guò)電流探測(cè)電路反饋到單片機(jī),單片機(jī)再根據(jù)相應(yīng)的控制算法對(duì)電機(jī)實(shí)現(xiàn)閉環(huán)控制。如EPS系統(tǒng)工作出現(xiàn)異常,單片機(jī)將驅(qū)動(dòng)EPS燈亮進(jìn)行報(bào)警提示,同時(shí)斷開(kāi)繼電器、離合器,退出電動(dòng)助力工作模式,轉(zhuǎn)為人工手動(dòng)助力模式。
3.2 PIC16F877單片機(jī)簡(jiǎn)介
該款機(jī)型是美國(guó)Microchip公司生產(chǎn)的8位RISC結(jié)構(gòu)的單片機(jī),具有高速數(shù)據(jù)處理的特性(執(zhí)行速度可達(dá)120ns),PIC16F877內(nèi)部自帶看門狗定時(shí)器、具有256Bytes的EEPROM、8k空間的FLASH存儲(chǔ)器、8路10位AD轉(zhuǎn)換功能、2個(gè)脈寬調(diào)制CCP模塊、在線燒錄調(diào)試(ISP)功能,寬電壓工作,可靠性高。PIC16F877有8級(jí)深度的硬件堆棧,RAM區(qū)的每個(gè)Byte位都可以尋址,有4條專用的位操作指令和2條移位指令。
3.3 直流電動(dòng)機(jī)的選擇
無(wú)刷直流電機(jī)在控制特性、效率、轉(zhuǎn)矩脈沖、制造成本等方面,具有明顯的優(yōu)勢(shì)。本項(xiàng)目采用永磁式無(wú)刷直流電機(jī)做為驅(qū)動(dòng)源。
3.4 扭矩、轉(zhuǎn)角傳感器的選擇
本文采用意大利BI公司的扭矩、位置復(fù)合傳感器,該傳感器除了提供扭矩信號(hào)外,還提供方向盤位置信號(hào),為回正和阻尼邏輯的開(kāi)發(fā)提供了便利。
3.5 電動(dòng)機(jī)驅(qū)動(dòng)控制電路的設(shè)計(jì)
電動(dòng)機(jī)驅(qū)動(dòng)控制電路必須能夠高精度、快速地調(diào)整電動(dòng)機(jī)的轉(zhuǎn)速和輸出轉(zhuǎn)矩,從而滿足EPS系統(tǒng)實(shí)時(shí)性和可靠性的要求。本項(xiàng)目中后向通道的核心控制采用脈寬調(diào)制(PWM)控制H橋電路。直流電機(jī)PWM控制方式有多種,根據(jù)電機(jī)工作的實(shí)際需要和系統(tǒng)的整體要求,本項(xiàng)目采用受限單極可逆PWM控制模式,主要優(yōu)點(diǎn)在于可以避免開(kāi)關(guān)管同臂導(dǎo)通,運(yùn)行可靠性高、不需附加延時(shí)電路、開(kāi)關(guān)頻率相對(duì)較高,特別適用于大功率、大轉(zhuǎn)動(dòng)慣量、可靠性要求較高的直流電機(jī)控制的場(chǎng)合。
3.5.1 電機(jī)驅(qū)動(dòng)電路
電動(dòng)機(jī)的驅(qū)動(dòng)電路主要包括FET橋式電路、FET基極驅(qū)動(dòng)電路、電機(jī)驅(qū)動(dòng)線路上的電流傳感器和繼電器構(gòu)成。
FET橋式電路主要由四個(gè)大功率MOSFET功率管組成,要求功率管具有良好的開(kāi)關(guān)特性、能承受較大的驅(qū)動(dòng)電流、且具有較長(zhǎng)的使用壽命,根據(jù)電機(jī)的功率參數(shù)及功率管的極限參數(shù)和電特性,我們采用四個(gè)相同的N溝道IRFP250功率管來(lái)構(gòu)成H橋電路。
FET 基極驅(qū)動(dòng)電路選用MOSFET專用柵極集成電路IR2109作為核心模塊,該芯片是一種單通道、柵極驅(qū)動(dòng)、高壓高速功率器件,采用高度集成的電平轉(zhuǎn)換技術(shù),大大簡(jiǎn)化了邏輯電路對(duì)功率器件的控制要求,上管采用外部自舉電容上電,使驅(qū)動(dòng)電源數(shù)目大大減少,控制了電路板的體積,降低了成本,提高了系統(tǒng)可靠性 [4]。
驅(qū)動(dòng)電路如圖3-2所示,兩個(gè)IR2109的IN端為驅(qū)動(dòng)H橋同臂上下兩個(gè)功率管的信號(hào)脈沖輸入端,分別通過(guò)具有高速性能的6N137光電耦合器接至PIC16F877單片機(jī)的兩個(gè)PWM脈沖輸出端口;兩個(gè)SD端分別與單片機(jī)的一個(gè)I/O口相連,控制電機(jī)停車操作;每個(gè)芯片的HO和LO端分別與同橋臂的功率管相連,控制電機(jī)轉(zhuǎn)速;VB端通過(guò)自舉二極管UF1005與+12V 電源相連,為了阻斷特殊電路中所承受的全部電壓,此處選用具有超快恢復(fù)特性的二極管UF1005。

圖3-2 電機(jī)驅(qū)動(dòng)電路
3.5.2 電機(jī)電流采樣電路
系統(tǒng)進(jìn)行電流采樣有兩方面用途,一是為電動(dòng)機(jī)提供保護(hù);二是通過(guò)電流傳感器反饋電樞電流的信號(hào),以便對(duì)電樞電流進(jìn)行閉環(huán)控制。標(biāo)準(zhǔn)電阻是一種常用的電流傳感器,由于其簡(jiǎn)單可靠、阻值穩(wěn)定、精度高、頻響好、輸出電壓直接比例于所流過(guò)的電流,在 PWM 系統(tǒng)中應(yīng)用相當(dāng)廣泛。標(biāo)準(zhǔn)電阻一般采用錳銅或硅錳銅制成。在采樣電路中,選用AD626把采樣信號(hào)放大10的n倍送至單片機(jī)相應(yīng)端口,具體電路如圖 3-3。

圖3-3 電機(jī)電流采樣電路
3.6 繼電器控制電路
如下圖3-4所示,CPU控制信號(hào)經(jīng)CPU端口PSP0輸出后,開(kāi)關(guān)管 Q1導(dǎo)通并驅(qū)動(dòng)功率三極管 Q12,使繼電器通電并閉合節(jié)點(diǎn),繼電器節(jié)點(diǎn)閉合后可給電機(jī)、離合器供電。CPU輸出的高低電平信號(hào)分別控制繼電器的合開(kāi)操作。
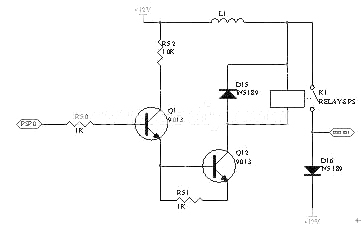
圖3-4 繼電器控制電路設(shè)計(jì)
4 結(jié)論
本文在對(duì)EPS系統(tǒng)的原理和助力控制過(guò)程的分析基礎(chǔ)上,對(duì) EPS 控制系統(tǒng)的硬件電路進(jìn)行了研究設(shè)計(jì),提出了采用受限單極性可逆PWM控制模式控制直流電機(jī);探索了在汽車電動(dòng)助力轉(zhuǎn)向系統(tǒng)中,低壓、低速、大電流永磁式無(wú)刷直流電機(jī)的控制方法。采用精密電阻進(jìn)行電機(jī)電流采樣的方法,實(shí)現(xiàn)了對(duì)直流電機(jī)輸出扭矩的閉環(huán)控制。在完成了硬件電路設(shè)計(jì)和軟件編程后,按照預(yù)定的助力特性曲線,對(duì)EPS系統(tǒng)進(jìn)行了臺(tái)架試驗(yàn),試驗(yàn)結(jié)果表明:電子控制單元信號(hào)采集的實(shí)時(shí)性較高,對(duì)電機(jī)閉環(huán)控制的跟隨性較好,整個(gè)系統(tǒng)具有良好的電動(dòng)助力特性,硬件部分的抗干擾能力和可靠性都很高。
此內(nèi)容為AET網(wǎng)站原創(chuàng),未經(jīng)授權(quán)禁止轉(zhuǎn)載。