
基于单片机的太阳自动跟踪系统的研究
摘要: 系统采用特制的四象限硅光电池作为太阳跟踪误差校正用传感器,并且采用AT89C51单片机作为智能单元,可以实现成本较低的全自动太阳跟踪系统。系统具备较好的稳定性,并能够达到相当好的精确度和灵活性。理论分析和设计结果表明,本方法可以满足太阳跟踪控制的要求。
Abstract:
Key words :
隨著社會(huì)經(jīng)濟(jì)的快速發(fā)展,人類(lèi)所面臨的能源問(wèn)題越來(lái)越突出,太陽(yáng)能作為一種清潔能源,無(wú)疑受到各國(guó)的普遍重視。在相同條件下,光照強(qiáng)度越大,太陽(yáng)能電池輸出功率越大。因而增大太陽(yáng)能電池受光面的光照強(qiáng)度,就可增大太陽(yáng)能電池輸出功率。除了提高太陽(yáng)光電池本身的轉(zhuǎn)換效應(yīng)和提高蓄電池充放電效應(yīng)外,對(duì)太陽(yáng)的自動(dòng)跟蹤是太陽(yáng)光伏發(fā)電系統(tǒng)中另一種提高轉(zhuǎn)換效率的有效手段。因此,在太陽(yáng)能的利用過(guò)程中,實(shí)施太陽(yáng)跟蹤是很有必要的。
對(duì)太陽(yáng)進(jìn)行跟蹤的方法很多,但不外乎為采用確定太陽(yáng)位置所用的兩種坐標(biāo)系統(tǒng),即赤道坐標(biāo)系和地平坐標(biāo)系,并分為雙軸跟蹤和單軸跟蹤。單軸跟蹤已在很多文獻(xiàn)作了介紹,本文要討論的為雙軸跟蹤。為了敘述方便,在以后的陳述中將兩種坐標(biāo)系下的整個(gè)系統(tǒng)統(tǒng)稱(chēng)為太陽(yáng)能板。
本文采用在地平坐標(biāo)系下的太陽(yáng)跟蹤及程序跟蹤和傳感器跟蹤相結(jié)合的控制方式,即采用程序控制,利用光學(xué)傳感器對(duì)太陽(yáng)能板做自動(dòng)定位和誤差校正,而通過(guò)單片機(jī)控制步進(jìn)電機(jī)來(lái)實(shí)現(xiàn)。單片機(jī)利用時(shí)鐘提供的日期和時(shí)間,計(jì)算出太陽(yáng)能板的預(yù)期位置,與編碼器提供的當(dāng)前位置比較,輸出控制信號(hào)。驅(qū)動(dòng)裝置根據(jù)單片機(jī)提供的信號(hào)控制俯仰角電機(jī)和方位角電機(jī)使太陽(yáng)能板運(yùn)行至太陽(yáng)垂直照射點(diǎn),從而進(jìn)行跟蹤。傳感器在太陽(yáng)能板位置出現(xiàn)誤差時(shí)進(jìn)行校正。
1 系統(tǒng)組成
系統(tǒng)由時(shí)鐘、單片機(jī)、驅(qū)動(dòng)裝置、編碼器、太陽(yáng)能板和傳感器6部分組成。系統(tǒng)的核心部件是傳感器和單片機(jī)。太陽(yáng)跟蹤系統(tǒng)原理見(jiàn)圖1。

1.1 智能單元與雙坐標(biāo)步進(jìn)電機(jī)控制系統(tǒng)
本文的控制系統(tǒng)選用了AT89C51單片機(jī)作為智能單元。AT89C51是一種低功耗、低電壓、高性能的8位單片機(jī)。片內(nèi)帶有一個(gè)4 KB的FLASH可編程、可擦除只讀存儲(chǔ)器。文中所述系統(tǒng)為地平坐標(biāo)系的雙軸自動(dòng)跟蹤控制系統(tǒng),因此采用雙坐標(biāo)步進(jìn)電機(jī)控制,雙坐標(biāo)步進(jìn)電機(jī)控制就是在x軸方向控制1臺(tái)步進(jìn)電機(jī),在y軸方向控制1臺(tái)步進(jìn)電機(jī)。這2臺(tái)步進(jìn)電機(jī)同時(shí)驅(qū)動(dòng)同一個(gè)對(duì)象,使對(duì)象在一個(gè)平面上以任意曲線運(yùn)動(dòng)。二維步進(jìn)電機(jī)控制系統(tǒng)原理如圖2所示。
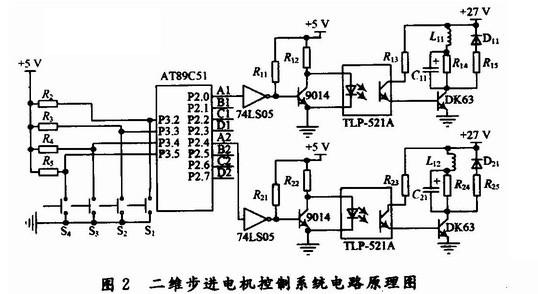
AT89C51單片機(jī)通過(guò)P2口輸出控制脈沖信號(hào),P2.0~P2.3為一路,P2.4~P2.7為一路,分兩路各控制1臺(tái)步進(jìn)電機(jī)。P3.2~P3.5設(shè)置為行程保護(hù)開(kāi)關(guān),作二維步進(jìn)電機(jī)正反向最大行程保護(hù)。功率放大電路中采用74LS05將單片機(jī)P2口脈沖信號(hào)進(jìn)行放大,經(jīng)9014控制光電耦合器,隔離后,由功率管DK63驅(qū)動(dòng)步進(jìn)電機(jī)的各相繞組,圖中L11,L12即為步進(jìn)電機(jī)的各相線圈。
1.2 光電傳感器
本控制系統(tǒng)中所采用光電傳感器為6塊相同的硅光電池,其中4塊用來(lái)制作四象限硅光電池,進(jìn)行誤差校正。2塊作為判斷光照強(qiáng)弱的信號(hào)輸出傳感器。
太陽(yáng)跟蹤傳感器是本系統(tǒng)的關(guān)鍵部件。為了保證太陽(yáng)能板的受光面始終與太陽(yáng)光線保持垂直而不發(fā)生偏離,采用特制的四象限硅光電池作為太陽(yáng)跟蹤誤差校正用傳感器。
如圖3所示為四象限跟蹤太陽(yáng)傳感器原理圖。當(dāng)光軸對(duì)準(zhǔn)太陽(yáng)時(shí),光斑的中心在光軸上。四個(gè)象限接收到相同的光功率,輸出相同的電壓信號(hào)。當(dāng)光軸未對(duì)準(zhǔn)太陽(yáng)時(shí)即太陽(yáng)光與光軸成一角度θ時(shí),光線經(jīng)光學(xué)系統(tǒng)照射到四象限光電池上形成的光斑必然發(fā)生偏移即(x≠O,y≠O)。由于各象限的光功率與各象限的光斑面積成正比,每個(gè)象限被光斑覆蓋的面積不同,因此各象限光電池產(chǎn)生的電壓不盡相同。根據(jù)上述將Vx,Vy進(jìn)行模數(shù)轉(zhuǎn)換,然后送入單片機(jī)。單片機(jī)通過(guò)驅(qū)動(dòng)設(shè)備可控制俯仰角電機(jī)和方位角電機(jī)轉(zhuǎn)動(dòng),直到Vx=Vy=0,即x=0,y=0,則表明系統(tǒng)光軸已經(jīng)對(duì)準(zhǔn)太陽(yáng),根據(jù)以上原理即可對(duì)太陽(yáng)能板位置誤差進(jìn)行校正。

判斷光強(qiáng)信號(hào)傳感器由兩塊光電池組成,一塊接受太陽(yáng)輻射,另外一塊受光面背光。如圖4所示,前一塊光電池的作用是:判斷太陽(yáng)直射輻射的強(qiáng)度,在直射輻射較弱時(shí)不啟動(dòng)跟蹤程序,從而避免多云天氣的盲目跟蹤。后一塊光電池的作用是當(dāng)長(zhǎng)時(shí)間陰天或多云轉(zhuǎn)晴后太陽(yáng)重新出現(xiàn)時(shí),判斷太陽(yáng)直射輻射的強(qiáng)度,來(lái)決定是否啟動(dòng)跟蹤程序。
1.3 采樣保持與A/D轉(zhuǎn)換電路
本系統(tǒng)選用的A/D轉(zhuǎn)換為MAXIM公司生產(chǎn)的MAXl86轉(zhuǎn)換器,是串行輸出CMOS芯片。其轉(zhuǎn)換速度快,精度高,耗電省,接線簡(jiǎn)單,適用于各種儀器儀表和自動(dòng)控制系統(tǒng)中的數(shù)據(jù)采集。MAXl86轉(zhuǎn)換器自帶有采樣保持器,因而系統(tǒng)不再設(shè)計(jì)采樣保持電路。而且與AT89C51為串行連接,接口電路如圖5所示。

1.4 時(shí)鐘芯片DSl302
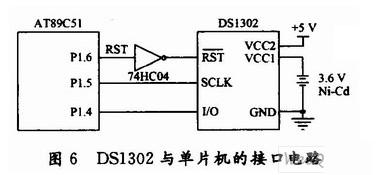
DSl302與AT89C51單片機(jī)接口采用3線(RST,SCLK和I/O)連接,AT89C51為主芯片負(fù)責(zé)控制2芯片之間的數(shù)據(jù)通訊。RST為數(shù)據(jù)通訊的使能信號(hào),為O則允許通訊;為1則禁止通訊。SCLK為數(shù)據(jù)通訊的位同步脈沖信號(hào),I/O是雙向串行數(shù)據(jù)傳輸線。RST,SCLK都是單片機(jī)發(fā)出的控制信號(hào),如圖6所示。
2 軟件設(shè)計(jì)
本文介紹的控制系統(tǒng)的軟件設(shè)計(jì)采用了結(jié)構(gòu)化、模塊化的程序設(shè)計(jì)方法。主程序初始化完畢之后,即進(jìn)入等待狀態(tài),單片機(jī)控制運(yùn)行交由中斷服務(wù)程序控制。所需完成的功能主要由子模塊實(shí)現(xiàn)。各部分獨(dú)立完成一定的功能,又有機(jī)的結(jié)合為一個(gè)整體,完成所要求的控制任務(wù)。
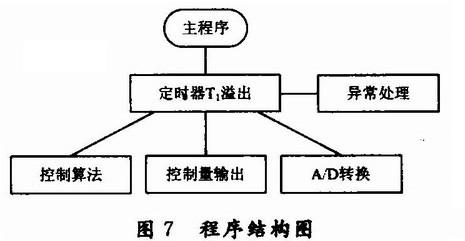
程序的結(jié)構(gòu)如圖7所示。主程序包括初始化、最初的A/D轉(zhuǎn)換程序。整個(gè)程序周期里,初始化程序只在主程序第一次執(zhí)行時(shí)執(zhí)行一次。初始化之后,進(jìn)行最初A/D轉(zhuǎn)換,實(shí)際上等于對(duì)A/D轉(zhuǎn)換濾波器置初始值。
2.1 定時(shí)器1溢出中斷服務(wù)程序
定時(shí)器1溢出中斷服務(wù)程序包含多個(gè)模塊,先后在一個(gè)T1溢出周期內(nèi)執(zhí)行完畢。這些模塊包括:控制算法、控制量輸出、A/D轉(zhuǎn)換、轉(zhuǎn)換結(jié)果處理和分析、異常處理等部分。通過(guò)每次T1溢出,周期性的采樣、反饋比較、調(diào)整、輸出,從而實(shí)現(xiàn)控制策略。
2.2 控制算法
編制控制算法子程序包括以下幾個(gè)步驟:計(jì)算當(dāng)前期望位置;計(jì)算補(bǔ)償通道輸出值;計(jì)算當(dāng)前實(shí)際位置;計(jì)算誤差和誤差通道輸出值;補(bǔ)償通道輸出值和誤差通道輸出值相加。
2.3 控制量輸出
單片機(jī)輸出的控制量為脈沖輸出,脈沖量的輸出可以通過(guò)軟件定時(shí)器,規(guī)定脈沖輸出的問(wèn)隔時(shí)間,從而規(guī)定了脈沖輸出的頻率。
2.4 A/D轉(zhuǎn)換及其轉(zhuǎn)換結(jié)果處理和分析
雖然硬件上對(duì)模擬輸入進(jìn)行了低通濾波,但是仍然會(huì)有一些因素可能造成模擬輸入量出現(xiàn)較大的誤差。為了防止這種情況的發(fā)生,需要進(jìn)行軟件濾波,即數(shù)字濾波處理。數(shù)字濾波有許多優(yōu)點(diǎn):
(1)數(shù)字濾波器是由程序?qū)崿F(xiàn)的,不需增加硬件設(shè)備,數(shù)字濾波可以有多個(gè)輸入通道共用,因而成本低。
(2)數(shù)字濾波由程序?qū)崿F(xiàn),不需要硬件設(shè)備,因而可靠性好,穩(wěn)定性高,不存在阻抗匹配問(wèn)題。
(3)數(shù)字濾波使用靈活,修改方便。而本文采用了算術(shù)平均值濾波方法。
2.5 異常處理
程序運(yùn)行中會(huì)發(fā)生多種異常情況,有些可以通過(guò)檢查輸入數(shù)據(jù)判斷,而有一些情況系統(tǒng)可以自行校正。光電傳感器誤差信號(hào)超出死區(qū)也應(yīng)視為異常情況??赡艿脑蚴浅霈F(xiàn)了一干擾光源或太陽(yáng)能板與太陽(yáng)位置發(fā)生偏離。為了避免在多云情況下的盲目跟蹤,如果輻射強(qiáng)度沒(méi)有達(dá)到特定值,則對(duì)于誤差信號(hào)超出死區(qū)不作任何操作。太陽(yáng)能板與太陽(yáng)位置發(fā)生偏離的情況下,系統(tǒng)有能力自動(dòng)的回復(fù)運(yùn)行狀態(tài)。
在每次定時(shí)器T1中斷時(shí),系統(tǒng)都檢查控制字。當(dāng)控制字表明系統(tǒng)在校正狀態(tài)時(shí),輸出控制量的值由預(yù)期位置量和光電傳感器誤差信號(hào)共同計(jì)算產(chǎn)生。
3 結(jié)語(yǔ)
系統(tǒng)采用特制的四象限硅光電池作為太陽(yáng)跟蹤誤差校正用傳感器,并且采用AT89C51單片機(jī)作為智能單元,可以實(shí)現(xiàn)成本較低的全自動(dòng)太陽(yáng)跟蹤系統(tǒng)。系統(tǒng)具備較好的穩(wěn)定性,并能夠達(dá)到相當(dāng)好的精確度和靈活性。理論分析和設(shè)計(jì)結(jié)果表明,本方法可以滿(mǎn)足太陽(yáng)跟蹤控制的要求。
此內(nèi)容為AET網(wǎng)站原創(chuàng),未經(jīng)授權(quán)禁止轉(zhuǎn)載。